2019 / 06 / 22
SmallPT —— 99 行代码光线追踪解析
光线追踪(Ray tracing)是三维计算机图形学中的特殊渲染算法:根据光路可逆原理,对每一个像素,沿着入射光线逆向追踪若干次反射、折射,进而计算此光线的颜色,把场景渲染出来。
理论上,光线追踪算法可以完整地模拟物理世界中的光照,分毫不差地计算出每个像素的颜色,但是这样做的算力消耗趋近于正无穷。所以实际上所有光线追踪算法都包含了一些近似优化的逻辑,以将运算开销控制在可接受的数量级内。
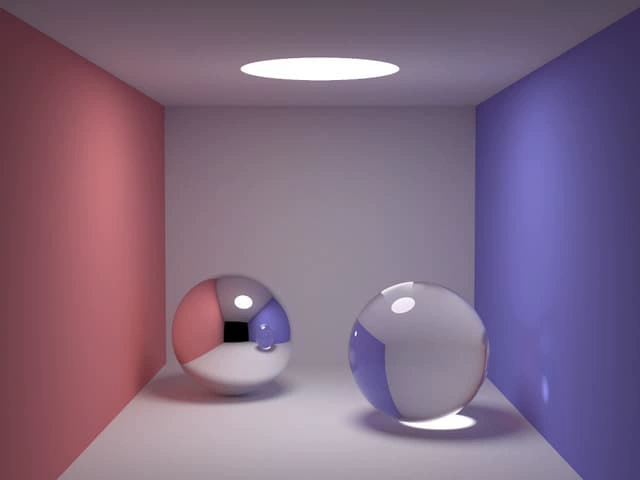
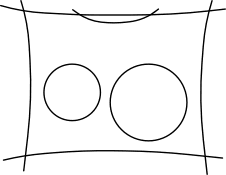
Rhythm & Hues Studios 公司的程序员 Kevin Beason 曾于 2010 年编写过一个名为 SmallPT 的 C++ 程序,仅包含 99 行代码,即实现了最简单的光线追踪效果。此程序可视为光追算法的可运行最小集,是初学者学习和理解光追原理的极佳材料,其运行结果如下图所示。作为一个门外汉,我花了好几个晚上研究这 99 行代码,并在这个极好的 PPT 的帮助下,总算基本弄明白了其运行的原理。不妨记录下来:
渲染方程
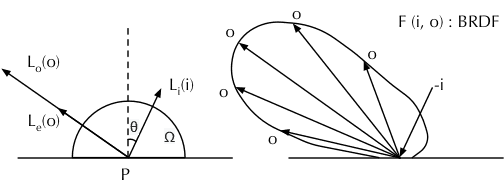
还是从最基础的渲染方程开始:
解释:
- 此方程描述的问题是:从物体表面上的一点 处,射入到观察者眼中的某条光线的强度,是如何确定的。
- 为射入观察者眼中的光线的颜色,即需要求取的值; 为出射方向。
- 为物体表面在点 向观察者方向自发射的光线的颜色(灯)。
- 表示环境入射到点 的光的颜色; 代表入射方向(为计算方便,取真实入射方向的反方向,不影响代表关系,后面也简称为入射方向)。
- 表示在给定 和 时,由 方向的入射单位光强产生的 方向的出射光的强度,此函数与表面的性质有关,又称表面的 BRDF 函数。
- 表示 与表面法线的夹角。
- 整个积分项表示:对半球(不透明材质)或全球(透明介质)内的所有入射方向 进行积分,得到的 方向的出射光强度。
依照光线追踪的原理,我们沿着 方向追踪到一处交点 ,就需要进行一次积分操作。在计算机程序中,积分是用求和模拟的,求和的次数越多(自变量的间隔越小),结果就越准确。假设每次积分都要进行 次求和操作,那么当追踪的光线遇到第一个交点时,会发散成 条光线;同时追踪这 条光线,到下一个交点,每条光线又会发散成 条光线……随着追踪深度的增加,计算开销的量级将按照指数级上升。
蒙特卡洛方法
蒙特卡洛方法(Monte Carlo method)是一种使用概率理论(通过大量随机数采样)进行数值计算以求取积分的方法。一个常用的有助理解的例子是:对「如何计算圆的面积」这个问题(圆的面积公式求取其实也是一个积分问题),蒙特卡洛的解法是「撒豆」:在包含圆的已知面积为 的矩形内随机采样(撒豆) 次,统计豆在圆内的次数为 ,则圆的面积为 。
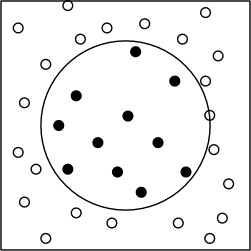
撒豆问题不仅可以解圆的面积,还可以解任意形状,甚至不规则形状的面积求取。
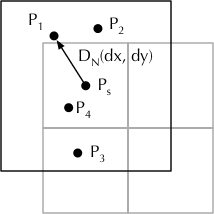
更具体地,蒙特卡洛方法可以表述为:
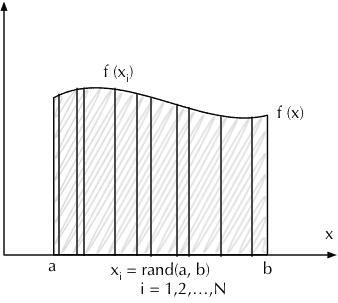
- 左侧表示函数 在区间 的积分,即下图中的部分阴影部分面积。
- 此积分的值,可以这样求取:随机在 区间取值,采样计算 ,然后计算所有样本的均值并乘以区间的长度。当取样数量 越大,最后的值就越接近真实的积分值。
有同学可能会问(我也曾有此困惑),为什么不直接均等分采样,而要随机采样呢?其实,对于计算一维的函数 ,区别确实不大,但对二维甚至更高维度的函数(此时需要求取重积分)如 ,情况就不一样了。
此时,如果采取均等分采样,就需要选择在 上均等分为若干份,选择在 上均等分为若干份(其实撒豆问题已经是二维积分了,只不过积分函数是最简单的二值函数)。随着维度的增加,我们采样的数量也更难以控制,甚至还会出现维度不确定的情况。相比之下,蒙特卡洛方法的随机采样,可以轻易地控制或调整采样的次数:取两次(或更多次数的)随机数,可以视为单次随机行为,其背后包含的某种「随机性」是一致的。
对于光线追踪而言,我们会追踪若干次反射或折射(这个次数又称深度),每一次反射或折射都需要进行一次采样,相当于增加了一个维度。如果每次采样的次数过多,随着深度的增加,总采样次数很快就会不可接受,而如果每次的采样次数过少,(直觉告诉我)那么第一次采样对后续的采样将造成比较大的偏差(这背后应该有更完整的数学解释)。而且,在光线追踪算法中,有时候是否继续进行采样取决于具体的采样值,这就让等分采样变得更加困难。实际上,这份光追算法的实现,在每次反射或折射时只取一个随机样本,而通过增加总总采样次数 来保证最后的结果满足期望。
光线追踪算法
使用蒙特卡洛方法,对每一次反射或折射不再进行积分,而是随机选取一条可能的反射或折射光线进行追踪。然后在开始追踪的源头处,重复多次追踪操作以求取期望,这就是 SmallPT 光追的算法。简述一下具体步骤:
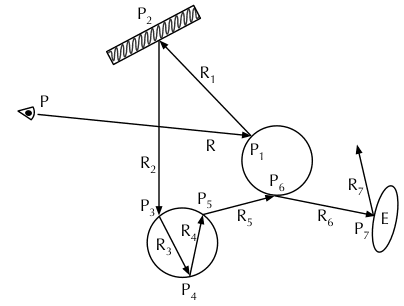
- 从每个像素 处发出一条射线 ,其方向与入射到相机并产生该像素的光线相反。
- 求取此射线照射到的物体表面的点 ,即与场景中物体的交点;如有多个交点,取距离相机最近的那个。如果未求到交点,则返回背景色。
-
射向
的光线强度,为
本身发射光强度
,加上反射或折射环境光的强度。
- :如果 处是光源,则 为光源的强度;否则, 为 0。
- :根据 处根据表面性质,按概率随机取一次反射的射线 ,然后重复 2 的步骤,分别递归地求取 , , , ……等等,直到满足一些特定条件停止递归。
以上便是单个像素的光追的算法。对单个像素,重复大量的次数求取平均值,作为此像素的颜色。
对每个像素完成以上步骤,就渲染出了整幅图像。
代码摘录
完整的代码摘抄如下:
#include <math.h> // smallpt, a Path Tracer by Kevin Beason, 2008
#include <stdlib.h> // Make : g++ -O3 -fopenmp smallpt.cpp -o smallpt
#include <stdio.h> // Remove "-fopenmp" for g++ version < 4.2
struct Vec { // Usage: time ./smallpt 5000 && xv image.ppm
double x, y, z; // position, also color (r,g,b)
Vec(double x_=0, double y_=0, double z_=0){ x=x_; y=y_; z=z_; }
Vec operator+(const Vec &b) const { return Vec(x+b.x,y+b.y,z+b.z); }
Vec operator-(const Vec &b) const { return Vec(x-b.x,y-b.y,z-b.z); }
Vec operator*(double b) const { return Vec(x*b,y*b,z*b); }
Vec mult(const Vec &b) const { return Vec(x*b.x,y*b.y,z*b.z); }
Vec& norm(){ return *this = *this * (1/sqrt(x*x+y*y+z*z)); }
double dot(const Vec &b) const { return x*b.x+y*b.y+z*b.z; } // cross:
Vec operator%(Vec&b){return Vec(y*b.z-z*b.y,z*b.x-x*b.z,x*b.y-y*b.x);}
};
struct Ray { Vec o, d; Ray(Vec o_, Vec d_) : o(o_), d(d_) {} };
enum Refl_t { DIFF, SPEC, REFR }; // material types, used in radiance()
struct Sphere {
double rad; // radius
Vec p, e, c; // position, emission, color
Refl_t refl; // reflection type (DIFFuse, SPECular, REFRactive)
Sphere(double rad_, Vec p_, Vec e_, Vec c_, Refl_t refl_):
rad(rad_), p(p_), e(e_), c(c_), refl(refl_) {}
double intersect(const Ray &r) const { // returns distance, 0 if nohit
Vec op = p-r.o; // Solve t^2*d.d + 2*t*(o-p).d + (o-p).(o-p)-R^2 = 0
double t, eps=1e-4, b=op.dot(r.d), det=b*b-op.dot(op)+rad*rad;
if (det<0) return 0; else det=sqrt(det);
return (t=b-det)>eps ? t : ((t=b+det)>eps ? t : 0);
}
};
Sphere spheres[] = {//Scene: radius, position, emission, color, material
Sphere(1e5, Vec( 1e5+1,40.8,81.6), Vec(),Vec(.75,.25,.25),DIFF),//Left
Sphere(1e5, Vec(-1e5+99,40.8,81.6),Vec(),Vec(.25,.25,.75),DIFF),//Rght
Sphere(1e5, Vec(50,40.8, 1e5), Vec(),Vec(.75,.75,.75),DIFF),//Back
Sphere(1e5, Vec(50,40.8,-1e5+170), Vec(),Vec(), DIFF),//Frnt
Sphere(1e5, Vec(50, 1e5, 81.6), Vec(),Vec(.75,.75,.75),DIFF),//Botm
Sphere(1e5, Vec(50,-1e5+81.6,81.6),Vec(),Vec(.75,.75,.75),DIFF),//Top
Sphere(16.5,Vec(27,16.5,47), Vec(),Vec(1,1,1)*.999, SPEC),//Mirr
Sphere(16.5,Vec(73,16.5,78), Vec(),Vec(1,1,1)*.999, REFR),//Glas
Sphere(600, Vec(50,681.6-.27,81.6),Vec(12,12,12), Vec(), DIFF) //Lite
};
inline double clamp(double x){ return x<0 ? 0 : x>1 ? 1 : x; }
inline int toInt(double x){ return int(pow(clamp(x),1/2.2)*255+.5); }
inline bool intersect(const Ray &r, double &t, int &id){
double n=sizeof(spheres)/sizeof(Sphere), d, inf=t=1e20;
for(int i=int(n);i--;) if((d=spheres[i].intersect(r))&&d<t){t=d;id=i;}
return t<inf;
}
Vec radiance(const Ray &r, int depth, unsigned short *Xi){
double t; // distance to intersection
int id=0; // id of intersected object
if (!intersect(r, t, id)) return Vec(); // if miss, return black
const Sphere &obj = spheres[id]; // the hit object
Vec x=r.o+r.d*t, n=(x-obj.p).norm(), nl=n.dot(r.d)<0?n:n*-1, f=obj.c;
double p = f.x>f.y && f.x>f.z ? f.x : f.y>f.z ? f.y : f.z; // max refl
if (++depth>5) if (erand48(Xi)<p) f=f*(1/p); else return obj.e; //R.R.
if (obj.refl == DIFF){ // Ideal DIFFUSE reflection
double r1=2*M_PI*erand48(Xi), r2=erand48(Xi), r2s=sqrt(r2);
Vec w=nl, u=((fabs(w.x)>.1?Vec(0,1):Vec(1))%w).norm(), v=w%u;
Vec d = (u*cos(r1)*r2s + v*sin(r1)*r2s + w*sqrt(1-r2)).norm();
return obj.e + f.mult(radiance(Ray(x,d),depth,Xi));
} else if (obj.refl == SPEC) // Ideal SPECULAR reflection
return obj.e + f.mult(radiance(Ray(x,r.d-n*2*n.dot(r.d)),depth,Xi));
Ray reflRay(x, r.d-n*2*n.dot(r.d)); // Ideal dielectric REFRACTION
bool into = n.dot(nl)>0; // Ray from outside going in?
double nc=1, nt=1.5, nnt=into?nc/nt:nt/nc, ddn=r.d.dot(nl), cos2t;
if ((cos2t=1-nnt*nnt*(1-ddn*ddn))<0) // Total internal reflection
return obj.e + f.mult(radiance(reflRay,depth,Xi));
Vec tdir = (r.d*nnt - n*((into?1:-1)*(ddn*nnt+sqrt(cos2t)))).norm();
double a=nt-nc, b=nt+nc, R0=a*a/(b*b), c = 1-(into?-ddn:tdir.dot(n));
double Re=R0+(1-R0)*c*c*c*c*c,Tr=1-Re,P=.25+.5*Re,RP=Re/P,TP=Tr/(1-P);
return obj.e + f.mult(depth>2 ? (erand48(Xi)<P ? // Russian roulette
radiance(reflRay,depth,Xi)*RP:radiance(Ray(x,tdir),depth,Xi)*TP) :
radiance(reflRay,depth,Xi)*Re+radiance(Ray(x,tdir),depth,Xi)*Tr);
}
int main(int argc, char *argv[]){
int w=1024/8, h=768/8, samps = argc==2 ? atoi(argv[1])/4 : 30;
Ray cam(Vec(50,52,295.6), Vec(0,-0.042612,-1).norm()); // cam pos, dir
Vec cx=Vec(w*.5135/h), cy=(cx%cam.d).norm()*.5135, r, *c=new Vec[w*h];
for (int y=0; y<h; y++){ // Loop over image rows
fprintf(stderr,"\rRendering (%d spp) %5.2f%%",samps*4,100.*y/(h-1));
for (unsigned short x=0, Xi[3]={0,0,(unsigned short)(y*y*y)}; x<w; x++)
for (int sy=0, i=(h-y-1)*w+x; sy<2; sy++) // 2x2 subpixel rows
for (int sx=0; sx<2; sx++, r=Vec()){ // 2x2 subpixel cols
for (int s=0; s<samps; s++){
double r1=2*erand48(Xi), dx=r1<1 ? sqrt(r1)-1: 1-sqrt(2-r1);
double r2=2*erand48(Xi), dy=r2<1 ? sqrt(r2)-1: 1-sqrt(2-r2);
Vec d = cx*( ( (sx+.5 + dx)/2 + x)/w - .5) +
cy*( ( (sy+.5 + dy)/2 + y)/h - .5) + cam.d;
r = r + radiance(Ray(cam.o+d*140,d.norm()),0,Xi)*(1./samps);
} // Camera rays are pushed ^^^^^ forward to start in interior
c[i] = c[i] + Vec(clamp(r.x),clamp(r.y),clamp(r.z))*.25;
}
}
FILE *f = fopen("image.ppm", "w"); // Write image to PPM file.
fprintf(f, "P3\n%d %d\n%d\n", w, h, 255);
for (int i=0; i<w*h; i++)
fprintf(f,"%d %d %d ", toInt(c[i].x), toInt(c[i].y), toInt(c[i].z));
}
本文的主要部分,就是对这段代码的解析:
矢量运算
定义 Vec 结构体描述三维矢量,重载运算符来实现矢量运算。
struct Vec {
double x, y, z;
Vec(double x_=0, double y_=0, double z_=0){ x=x_; y=y_; z=z_; }
Vec operator+(const Vec &b) const { return Vec(x+b.x,y+b.y,z+b.z); }
Vec operator-(const Vec &b) const { return Vec(x-b.x,y-b.y,z-b.z); }
Vec operator*(double b) const { return Vec(x*b,y*b,z*b); }
Vec mult(const Vec &b) const { return Vec(x*b.x,y*b.y,z*b.z); }
Vec& norm(){ return *this = *this * (1/sqrt(x*x+y*y+z*z)); }
double dot(const Vec &b) const { return x*b.x+y*b.y+z*b.z; }
Vec operator%(Vec&b){return Vec(y*b.z-z*b.y,z*b.x-x*b.z,x*b.y-y*b.x);}
};
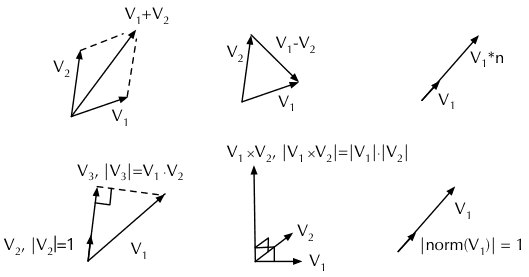
矢量运算包括(假设 ; ):
- 加法
operator+: 。 - 减法
operator-: 。 - 乘法
mult(): 。这种矢量分量直接相乘的运算通常用于颜色的计算,在三维空间中并无特殊的物理意义。 - 点乘
dot(): ,其中 为 与 的夹角。点乘的结果是一个标量,物理含义是 在 方向上的投影。 - 叉乘
operator%: ,叉乘的结果是一个矢量,物理意义是垂直于 和 的矢量(按 顺序右手螺旋),其长度为 和 构成的平行四边形面积。 - 矢量乘以标量
operator*: 。 - 归一化
norm(): ,其物理意义是保持矢量方向不变,将其长度缩放为单位长度 1。
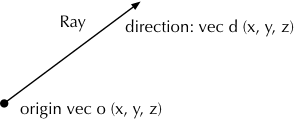
射线
通过定义射线的出射点 和出射方向 来定义射线:
struct Ray { Vec o, d; Ray(Vec o_, Vec d_) : o(o_), d(d_) {} };
定义场景
如前文 SmallPT 的渲染效果图所示,整个场景由一个房间,一个光源和两个球体组成。为了简单,SmallPT 将场景全部用球体来表示,房间的墙壁就用直径极大(使观者感受不到墙壁是弯曲的)的球体来表示。
球体对象的表示
- 首先枚举出三种表面特性:散射面——用于墙壁,镜面——用于左侧的镜面小球,折射面——用于右侧的玻璃小球。
- 定义球体,内容包括:
- 数值类型成员:半径 ;
- 矢量类型成员:圆心位置 ,表面发光强度(颜色) ,表面散射颜色 ;
- 表面特性 ;
enum Refl_t { DIFF, SPEC, REFR }; // material types, used in radiance()
struct Sphere {
double rad; // radius
Vec p, e, c; // position, emission, color
Refl_t refl; // reflection type (DIFFuse, SPECular, REFRactive)
Sphere(double rad_, Vec p_, Vec e_, Vec c_, Refl_t refl_):
rad(rad_), p(p_), e(e_), c(c_), refl(refl_) {}
// ...
};
射线与球体相交
Sphere 上定义了 intersect 方法,以求取给定的射线与球体是不是相交。如果相交则返回射线原点与交点的距离。
double intersect(const Ray &r) const { // returns distance, 0 if nohit
Vec op = p-r.o; // Solve t^2*d.d + 2*t*(o-p).d + (o-p).(o-p)-R^2 = 0
double t, eps=1e-4, b=op.dot(r.d), det=b*b-op.dot(op)+rad*rad;
if (det<0) return 0; else det=sqrt(det);
return (t=b-det)>eps ? t : ((t=b+det)>eps ? t : 0);
}
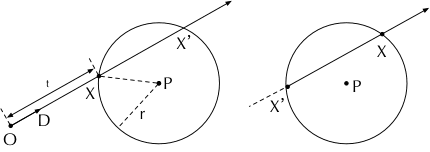
注意,下面为了清楚,我们使用大写字母为矢量,小写字母为标量来进行推导。我们需要求解的是射线的原点 与交点 的距离 ,而条件是:
- 点在射线上,即 。
- 点在球面上,即 与球心 的距离等于球的半径 。即 ,也就是 。
将 (1) 中关于 的表达式代入 (2),得到:
展开得到:
这已经是一个一元二次方程,自变量 是未知的。所有矢量经过平方或点积后都成为了标量,可以直接根据一元二次方程 的求根公式:
计算出根 。
- 一元二次方程可能没有实根的,此时射线与球体不相交。这对应着代码中
det<0的情况,直接返回 0。 - 一元二次方程可能有两个实根,此时射线(所在的直线)与球体有两个交点。我们需要取的是最小的正根。如果另一个根 (对应交点为 )大于 ,表明是左图的情况;如果 小于等于 0,表明是右图的情况,这条光线是在介质内的折射光线。
使用球体表示场景
代码定义了一个 spheres 数组来表达整个场景,每一个球体分别是:
- 左侧墙体,红色;墙体的半径都很大,观者感知不到曲率;墙体的反射类型都是散射,但是颜色有所不同。
- 右侧墙体,蓝色。
- 后面墙体,灰色。
- 前面墙体,黑色。
- 底部墙体,灰色。
- 顶部墙体,灰色。
- 左侧球体,镜面材质。
- 右侧球体,透明玻璃材质,光线可能折射进入玻璃中继续传播。
- 顶部的光源,发射出强度为 12 的白光。
Sphere spheres[] = { //Scene: radius, position, emission, color, material
Sphere(1e5, Vec( 1e5+1,40.8,81.6), Vec(),Vec(.75,.25,.25),DIFF),//Left
Sphere(1e5, Vec(-1e5+99,40.8,81.6),Vec(),Vec(.25,.25,.75),DIFF),//Rght
Sphere(1e5, Vec(50,40.8, 1e5), Vec(),Vec(.75,.75,.75),DIFF),//Back
Sphere(1e5, Vec(50,40.8,-1e5+170), Vec(),Vec(), DIFF),//Frnt
Sphere(1e5, Vec(50, 1e5, 81.6), Vec(),Vec(.75,.75,.75),DIFF),//Botm
Sphere(1e5, Vec(50,-1e5+81.6,81.6),Vec(),Vec(.75,.75,.75),DIFF),//Top
Sphere(16.5,Vec(27,16.5,47), Vec(),Vec(1,1,1)*.999, SPEC),//Mirr
Sphere(16.5,Vec(73,16.5,78), Vec(),Vec(1,1,1)*.999, REFR),//Glas
Sphere(600, Vec(50,681.6-.27,81.6),Vec(12,12,12), Vec(), DIFF) //Lite
};
可以看出,坐标轴的原点位于盒子的左面、后面和底面的交点附近。宽度 100 左右,高度 80 左右,深度 170 左右。
准备渲染
在真正开始渲染之前,还需要做一些准备工作。
确定相机和输出图像
先跳过 clamp,toInt,radiance 这几个函数,直接来看 main 函数。
int main(int argc, char *argv[]){
int w=1024, h=768, samps = argc==2 ? atoi(argv[1])/4 : 30;
Ray cam(Vec(50,52,295.6), Vec(0,-0.042612,-1).norm()); // cam pos, dir
Vec cx=Vec(w*.5135/h), cy=(cx%cam.d).norm()*.5135, r, *c=new Vec[w*h];
for (int y=0; y<h; y++){ // Loop over image rows
fprintf(stderr,"\rRendering (%d spp) %5.2f%%",samps*4,100.*y/(h-1));
for (unsigned short x=0, Xi[3]={0,0,(unsigned short)(y*y*y)}; x<w; x++)
// ... 暂时先省略
}
FILE *f = fopen("image.ppm", "w"); // Write image to PPM file.
fprintf(f, "P3\n%d %d\n%d\n", w, h, 255);
for (int i=0; i<w*h; i++)
fprintf(f,"%d %d %d ", toInt(c[i].x), toInt(c[i].y), toInt(c[i].z));
}
首先,定义需要渲染图像的宽度(1024),高度(768),对每个像素的采样次数(命令行参数传入,或 120 次)。注意,变量 samps 的值是采样次数的 1/4,在这个例子中,最终渲染在图像上的每一个像素,又会拆分成 4 个子像素进行追踪和采样,而 samps 的值是子像素的采样次数。
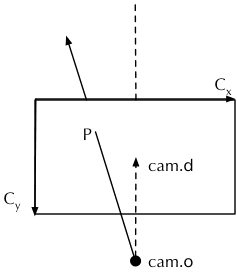
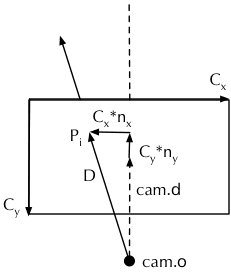
然后,使用射线类的变量 cam 来表示相机,射线的原点 cam.o 即是相机的位置,而射线的方向 cam.d 是相机朝向的方向。由于相机本身的位置只是一个点,所以需要把渲染出的图像视为在屏幕前方(亦或是后方,参考一下眼球和相机的构造)不远处的一块矩形幕布,抵达相机的光线穿透幕布时会在与幕布的交点
处留下颜色,这样就在幕布上投影了。只要幕布的分辨率和宽高比不变,其距离相机的远近与最终结果是无关的,所以程序直接设定幕布与相机的距离是 1,设定幕布本身的高度为 0.5135(配合像素尺寸的宽高比,其实这里已经暗含了相机的水平和垂直视场角的信息)。然后,求取长度等于幕布真实宽度 0.5135*w/h 的水平矢量 cx(平行于 X 轴),求取长度等于幕布真实高度 0.5135 的垂直矢量 cy(通过 cx 与 cam.d 叉乘而来)。
再接着,生成长度为 w*h 的 Vec 类型数组 c 备用。这个数组的作用是存储渲染的结果。
最后,遍历宽度和高度,对每一个像素进行渲染,并将渲染得到值写入到数组 c 中,并将其输出为 PPM 格式的图片,以便打开查看渲染效果。
PPM 是一种基于文本的图片格式,能够帮助你避免考虑图片文件编码问题,轻易地按像素输出图片。比如以下文本内容就是一张 4x4 的图片。
P3 # feep.ppm 4 4 15 0 0 0 0 0 0 0 0 0 15 0 15 0 0 0 0 15 7 0 0 0 0 0 0 0 0 0 0 0 0 0 15 7 0 0 0 15 0 15 0 0 0 0 0 0 0 0 0
总结一下各个变量的含义:
w和h:宽度和高度像素数。samps:每个像素采样次数的 1/4。cam:相机描述。cx和cy:长度与幕布真实尺寸相同的水平、垂直矢量。c:按像素存储渲染结果的数组。
子像素采样
接下来,我们看一下如何计算每个像素的值的(即之前省略的部分)。对每一个像素,都将其拆分为 2x2 一共 4 个子像素。一个当然的想法是,以子像素的中心点
作为射线的出发点开始追踪,但是由于每个子像素都会进行 samps 次光追取均值,所以这里就引入了一次随机过程:以子像素的中心点,在一个像素大小的范围内进行一次随机采样,并以采样到的点
为射线的出发点,进行一次光追。对每个子像素完成 samps 次光追,依次以
,
……为出发点,最后求均值。
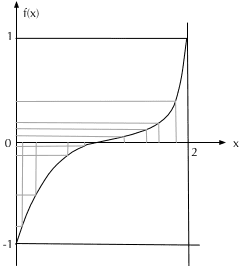
而且,为了使渲染的质量更高一些(达到相同渲染质量所需的采样次数更小一些),这里对随机过程进行了优化:对随机数进行了一次 tent 滤波。此滤波函数将 从 区间映射到了 ,当 为随机的值时, 的分布更向中点值 集中(从图中可以看出)。
然后,拿到经过滤波后的随机数
,
,计算
在整个画布中的归一化坐标(假设成为
和
,如 nx=(sx+0.5+dx)/2+x)/w-0.5),再乘以之前求得的画布真实尺寸矢量
和
,加上相机本身的方向矢量
,就得到了最终从相机原点射向
的矢量
,即代码中的 d。
for (int sy=0, i=(h-y-1)*w+x; sy<2; sy++) // 2x2 subpixel rows
for (int sx=0; sx<2; sx++, r=Vec()){ // 2x2 subpixel cols
for (int s=0; s<samps; s++){
double r1=2*erand48(Xi), dx=r1<1 ? sqrt(r1)-1: 1-sqrt(2-r1);
double r2=2*erand48(Xi), dy=r2<1 ? sqrt(r2)-1: 1-sqrt(2-r2);
Vec d = cx*( ( (sx+.5 + dx)/2 + x)/w - .5) +
cy*( ( (sy+.5 + dy)/2 + y)/h - .5) + cam.d;
r = r + radiance(Ray(cam.o+d*140,d.norm()),0,Xi)*(1./samps);
} // Camera rays are pushed ^^^^^ forward to start in interior
c[i] = c[i] + Vec(clamp(r.x),clamp(r.y),clamp(r.z))*.25;
}
最后,调用 radiance,沿着穿过此子像素的射线,在 140 倍远(让光追的开始点进到盒子里面,而不会直接被朝前的表面挡掉)的地方开始进行光线追踪算法。进行 samps 次,取均值,再基于 4 个子像素再取一次均值,就得到了这个像素的颜色。
erand48() 函数是 C 标准库提供的随机函数。传入长度为 3 的数组作为随机种子,返回 [0, 1] 区间的双精度浮点数,同时改写传入的随机种子,便于下一次调用 erand() 时传入(以获取一个不同的结果)。
总结一下各个变量的含义:
i:为当前像素在c中的索引。r:通过光追计算出的子像素的颜色。sx和sy:子像素索引,为 0 或 1。r1和r2:滤波用自变量,在 [0, 2] 区间随机取得。dx和dy:滤波后的随机自变量,分布在 [-1, 1] 区间内。d:从相机原点指向子像素位置的矢量。
光线追踪
讲了这么多,终于到正餐了。函数 radiance() 即进行了一次光线追踪。
Vec radiance(const Ray &r, int depth, unsigned short *Xi){
double t; // distance to intersection
int id=0; // id of intersected object
if (!intersect(r, t, id)) return Vec(); // if miss, return black
const Sphere &obj = spheres[id]; // the hit object
Vec x=r.o+r.d*t, n=(x-obj.p).norm(), nl=n.dot(r.d)<0?n:n*-1, f=obj.c;
double p = f.x>f.y && f.x>f.z ? f.x : f.y>f.z ? f.y : f.z; // max refl
if (++depth>5) if (erand48(Xi)<p) f=f*(1/p); else return obj.e; //R.R.
if (obj.refl == DIFF){ // Ideal DIFFUSE reflection
// ...
} else if (obj.refl == SPEC) // Ideal SPECULAR reflection
// ...
// ... // Ideal dielectric REFRACTION
}
函数 radiance() 接收三个参数,射线 r,深度 depth 和随机种子 Xi。此函数是一个递归函数,在计算射线颜色时候,遇到反射或折射,会计算出下一次反射或折射的射线,然后递归调用自己求算下一次射线的颜色。深度 depth 标记了反射/折射的次数。
下面看 radiance() 函数的逻辑:
求取交点和递归结束条件
首先,对场景中的所有球体对象,尝试求取射线与之交点。函数 intersect() 负责做这件事:遍历 spheres 数组,依次调用 sphere 对象上的 intersect() 方法,并保留最小的正值 t 和对应球体在 spheres 数组中的索引 i。
inline bool intersect(const Ray &r, double &t, int &id){
double n=sizeof(spheres) /sizeof(Sphere), d, inf=t=1e20;
for(int i=int(n);i--;) if((d=spheres[i].intersect(r))&&d<t){t=d;id=i;}
return t<inf;
}
如果没有任何对象与之相交,直接返回黑色(递归的结束条件 1)。
如果检测到有球体与射线相交,首先检查当前深度是否大于了 5(之前已经经过了 5 次反射或折射),如果是,那么遵循一个概率来随机地决定采取以下哪一种方案:
- 放弃反射光的贡献,直接返回物体的出射光——虽然大部分时候是 0(递归的结束条件 2)。
- 继续追踪光线。
这个概率就是当前物体表面的颜色 RGB 分量中最大的那个分量,归一化后的值。换言之,物体越暗(的颜色值越低),越容易被筛选到第 1 种方案(因为物体暗,环境光反射贡献的值也会小),而物体越亮,越容易被筛选到第二种方案。值得注意的是,当选择第二种方案时,需要把物体的颜色按照概率调高一些 f=f*(1/p),这是因为那些运气不够好,被筛选到 1 方案光线,其反射分量完全地消失了,这会导致最终计算出的颜色的期望(也就是说,即使采样无穷次)与真实值产生偏差。在运气好的 2 方案中调整颜色,可以消除这个偏差。
按照概率进行随机选择是无处不在的,只要采样的次数足够多,那么遵照概率选择计算得到的均值就能够逼近真实值。
接着,如果深度小于等于 5,那么不管物体的颜色值如何,都会正常地递归地进行光线追踪。在此之前,还需要预先求取一些变量的值,比如法线 nl 等,便于后续使用。
总结一下各变量的意义:
t:交点距离相机原点的距离。id:相交的球体在spheres数组中的索引。obj:相交的球体Sphere对象。x:交点的位置。n:球体在交点处的归一化的法线(从球心射向表面)。nl:与反射/折射上下文契合的归一化的法线:如果射线在球体外部,nl与n相同;如果射线在球体内部(折射),nl与n相反。
散射(漫反射)
追踪光线,当代表光线的射线与球体相交时,根据球体表面的特性,进行不同的操作(代码中省略的部分)。
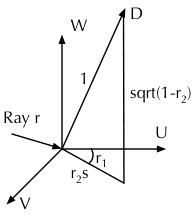
如果物体表面是漫反射,将随机选取一个角度取归一化的反射光线 :
- 确定互相正交的三个归一化矢量 , 和 ,其中 为反射面的法线。
- 在区间 中随机确定一个值 ,并使 作为反射光线 在法线 方向上投影的长度,使 也就是 成为反射光线在表面上投影的长度。
- 在区间 中随机确定一个角度值 ,使之成为反射光点 在反射表面(即 平面)的投影与 轴的交角。
- 极坐标公式转笛卡尔坐标, 计算出在半球面的随机矢量,再归一化得到反射矢量 。
最后,递归地调用 radiance() 函数,将反射光线作为参数传入,传入已自增过一次的深度和随机种子。其结果乘以表面的颜色,再加上球体表面的发射光颜色,作为结果返回。这就是此光追算法对散射表面的处理。
if (obj.refl == DIFF){ // Ideal DIFFUSE reflection
double r1=2*M_PI*erand48(Xi), r2=erand48(Xi), r2s=sqrt(r2);
Vec w=nl, u=((fabs(w.x)>.1?Vec(0,1):Vec(1))%w).norm(), v=w%u;
Vec d = (u*cos(r1)*r2s + v*sin(r1)*r2s + w*sqrt(1-r2)).norm();
return obj.e + f.mult(radiance(Ray(x,d),depth,Xi));
总结一下各变量的含义:
u,v,w:互相正交的三个归一化矢量,w即为法向量。r1:反射光线在反射表面与u的交角。r2与r2s:r2s为反射光线在反射表面投影的长度,r2为此值的平方。d:随机求取的反射方向。
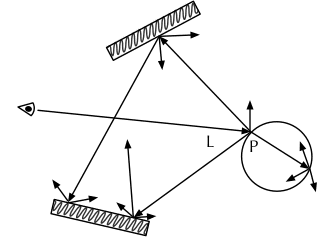
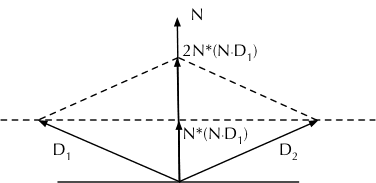
镜面反射
镜面反射比较简单,因为对于确定的入射光线,反射的方向也是确定的,因此没有随机过程,直接取镜面反射的方向继续进行光追。
镜面反射的求法比较简单,不过也记录一下吧:如下图对称的两条射线
和
,而法线为
(法线是归一化的)。此时有
,求解
。在代码中,
就是 -r.d,带入得到 r.d-n*2*n.dot(r.d),即反射光线的。由于 r.d 也已经是归一化的了,所以求取得到的结果也一定是归一化的。
代码如下:
} else if (obj.refl == SPEC) // Ideal SPECULAR reflection
return obj.e + f.mult(radiance(Ray(x,r.d-n*2*n.dot(r.d)),depth,Xi));
折射
折射是比较复杂的。不同的物体有不同的折射率,空气的折射率为 1,玻璃的折射率为 1.5。根据折射定理:光线从折射率为 的介质折射到折射率为 的介质,折射角满足(此定理可以从更一般的麦克斯韦电磁方程组推导出来,厉害厉害):
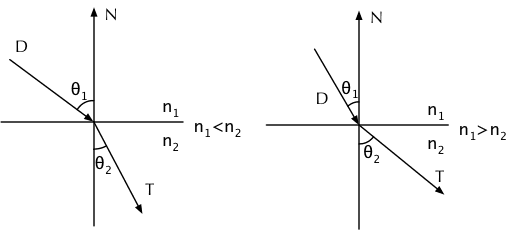
全反射
首先需要考虑的是全反射现象,即光线从光密介质(玻璃)向光疏介质(空气)传播时(上图右半部分), 大于临界角(使得 为 90° 的 ),以至于不存在 满足上述折射定理时,所有光都被反射的现象,即:
两边平方并作简单变换,得到:
由于 nnt 为
,而 ddn 为
,代入上式,得到全反射的条件即是 1-nnt*nnt*(1-ddn*ddn))<0。满足全反射条件时,镜面反射的方式进行处理。
Ray reflRay(x, r.d-n*2*n.dot(r.d)); // Ideal dielectric REFRACTION
bool into = n.dot(nl)>0; // Ray from outside going in?
double nc=1, nt=1.5, nnt=into?nc/nt:nt/nc, ddn=r.d.dot(nl), cos2t;
if ((cos2t=1-nnt*nnt*(1-ddn*ddn))<0) // Total internal reflection
return obj.e + f.mult(radiance(reflRay,depth,Xi));
总结一下各变量的含义:
reflRay:镜面反射方向,与上一节中的求法完全一致。into:由空气(试图)进入玻璃则为true,由玻璃(试图)进入空气则为false。nc和nt:空气和玻璃的折射率。nnt为折射率比值,当追踪的射线是从空气进入玻璃时,nnt为1.0/1.5,当射线是从玻璃进入空气时,nnt为1.5。ddn:即 的值,由 和 点乘而来。
正常折射
所谓正常折射,即是光线一部分镜面反射,一部分折射进入另一种介质。此时,我们需要:
- 计算折射光线矢量 。
- 计算有多少比例的光线被反射,有多少比例的光线被折射。
- 根据条件,选择以随机或非随机的形式,递归地进行光线追踪。
首先计算折射光线矢量 :
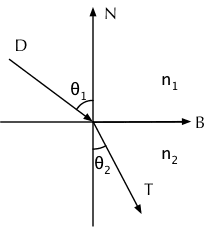
首先,假设入射光线在表面平面的投影矢量(并归一化)为 已知,折射角 也已知,我们可以得到 为:
其中 就是入射光线平面上的投影矢量(因为入射和折射在同一个平面内)归一化得到,而此投影矢量可以使用 减去 在法线上的投影 (注意这里点积是个负数)来得出,因此:
同时 的正弦和余弦值也可以通过折射定律求得:
全部代入,可得:
按照上述公式,将变量代入,即可计算出折射光线归一化矢量 tdir:
Vec tdir = (r.d*nnt - n*((into?1:-1)*(ddn*nnt+sqrt(cos2t)))).norm();
接下来,计算有多少比例的光线被反射,有多少比例的光线被折射。根据电动力学的一些理论,入射光线(普通的非偏振光)被反射/折射的比例,与入射角 ,两种介质的折射率都有关系。当入射角等于 0(即垂直入射到表面)时,被反射的比例 为:
而当入射角为 时的反射比例 为:
最后,基于当前光追的深度:
- 如果深度小于等于 2,那么分别递归地追踪反射光和折射光,将两者对颜色的贡献再加上物体本身的发光,作为结果返回。
- 如果深度大于 2,那么依据折射和反射光线的占比来进行概率随机,选择追踪反射光或折射光中的一支。换言之,如果反射光占比高,那么就有较大的可能性随机到反射光线,反之亦然。注意,这时由于我们放弃了另一种可能性,会导致结果的期望产生偏差,所以需要进行一次修正。
对玻璃材质,前几次反射、折射对最终的结果的贡献比较大,所以选择都进行追踪。但是这样做一下子使得某些追踪的采样次数发散为了原来的 4 倍,如果深度改为 4,可能就是 16 倍。所以代码把发散深度限制在 2 这样一个比较小的数值,也算是在效果和性能间达到一个平衡。
代码如下:
double a=nt-nc, b=nt+nc, R0=a*a/(b*b), c = 1-(into?-ddn:tdir.dot(n));
double Re=R0+(1-R0)*c*c*c*c*c,Tr=1-Re,P=.25+.5*Re,RP=Re/P,TP=Tr/(1-P);
return obj.e + f.mult(depth>2 ? (erand48(Xi)<P ? // Russian roulette
radiance(reflRay,depth,Xi)*RP : radiance(Ray(x,tdir),depth,Xi)*TP) :
radiance(reflRay,depth,Xi)*Re+radiance(Ray(x,tdir),depth,Xi)*Tr);
最后解释一下各个变量的含义:
a和b:用以计算 的临时变量。R0:入射角为 0 时反射光的占比。c:即 。Re:当前入射角下反射光的占比。Tr:折射光的占比。RP:随机到反射光时,对结果的修正的因子。TP:随机到折射光时,对结果的修正的因子。
这样,光追算法就全部完成了。
感想
一直觉得光线追踪是非常高端的存在,因为没有基础,想了解也不知从何看起。一个偶然的机会发现到这个 demo,觉得挺有意思,就拿过来研究了。结果发现看起来还是比较吃力,好在另外一个老外的解读 PPT 帮了很大的忙。
把学习过的东西消化了,再重新写出来是件很折磨的事情,但收获也不小。每一个公式一步一步推导过来,对一些地方「为什么这么做」也有了不一样的体会。数学还是挺重要的,而且能够给人带来很强的成就感。